




PROTOTYPE SISTEM KENYAMANAN TERMAL
SEBAGAI MEDIA EDUKASI BAGI MASYARAKAT HUNTARA PASCA BENCANA BERBASIS STM32 BLUE
PILL
1. Pendahuluan [Kembali]
Bencana alam seperti gempa bumi, banjir, tanah longsor, maupun letusan gunung berapi sering kali mengakibatkan kerusakan infrastruktur dan memaksa masyarakat untuk tinggal sementara di Hunian Sementara (Huntara). Dalam kondisi pasca bencana, aspek kenyamanan lingkungan menjadi salah satu faktor penting yang memengaruhi kesehatan, produktivitas, dan kualitas hidup masyarakat. Salah satu aspek yang sangat berpengaruh adalah kenyamanan termal, yaitu kondisi lingkungan yang memberikan rasa nyaman terhadap suhu, kelembapan, kualitas udara, dan pencahayaan di dalam ruangan. Namun, kondisi Huntara yang umumnya dibangun secara cepat dan sederhana sering kali memiliki ventilasi yang terbatas, suhu yang tinggi pada siang hari, kelembapan yang tidak stabil, serta kualitas udara yang kurang baik akibat aktivitas penghuni maupun lingkungan sekitar.
Pemantauan kondisi lingkungan di
Huntara pada umumnya masih dilakukan secara manual dan bergantung pada persepsi
masing-masing penghuni. Cara ini memiliki berbagai keterbatasan karena tidak
mampu memberikan informasi yang akurat dan berkelanjutan mengenai kondisi suhu,
kelembapan, kualitas udara, maupun pencahayaan ruangan. Akibatnya, penghuni
sering kali baru menyadari adanya kondisi lingkungan yang tidak nyaman ketika
dampaknya sudah dirasakan, seperti rasa gerah, sesak akibat kualitas udara yang
buruk, atau gangguan kenyamanan saat beraktivitas maupun beristirahat.
Seiring perkembangan teknologi
elektronika dan sistem embedded, berbagai sensor lingkungan kini dapat
digunakan untuk melakukan pemantauan kondisi ruangan secara otomatis dan
real-time. Teknologi tersebut memungkinkan pengukuran parameter lingkungan secara
lebih akurat sehingga dapat digunakan sebagai dasar pengambilan keputusan dalam
meningkatkan kenyamanan penghuni. Selain itu, penerapan teknologi sensor juga
dapat menjadi sarana edukasi bagi masyarakat untuk memahami pentingnya menjaga
kualitas lingkungan tempat tinggal, terutama dalam kondisi pasca bencana yang
membutuhkan perhatian khusus terhadap kesehatan dan kenyamanan.
Berdasarkan permasalahan tersebut,
dirancang sebuah Prototype Sistem Kenyamanan Termal Sebagai Media Edukasi
Bagi Masyarakat Huntara Pasca Bencana Berbasis STM32 Blue Pill. Sistem ini
memanfaatkan mikrokontroler STM32 Blue Pill sebagai pusat kendali yang
terintegrasi dengan beberapa sensor, yaitu sensor suhu dan kelembapan
DHT11/DHT22 untuk memantau kondisi termal ruangan, sensor kualitas udara MQ-135
untuk mendeteksi tingkat pencemaran udara dan keberadaan gas tertentu, serta
sensor LDR untuk mengukur intensitas cahaya lingkungan. Data yang diperoleh
dari sensor kemudian diolah oleh STM32 Blue Pill dan ditampilkan melalui layar
OLED sebagai media informasi yang mudah dipahami oleh pengguna.
Selain memberikan informasi kondisi
lingkungan secara real-time, sistem ini juga dilengkapi dengan beberapa
perangkat keluaran sebagai indikator dan aktuator otomatis. LED hijau, kuning,
dan merah digunakan untuk menunjukkan tingkat kenyamanan suhu ruangan,
sedangkan buzzer berfungsi sebagai alarm peringatan ketika kondisi lingkungan
berada pada kategori yang tidak aman. Untuk meningkatkan sirkulasi udara,
sistem mengendalikan exhaust fan melalui relay yang akan aktif secara otomatis
ketika suhu atau kualitas udara melebihi batas yang telah ditentukan. Sensor
LDR juga digunakan untuk mengoptimalkan tampilan sistem berdasarkan kondisi
pencahayaan lingkungan sehingga penggunaan energi menjadi lebih efisien.
Dibandingkan dengan metode
pemantauan lingkungan secara konvensional yang hanya mengandalkan pengamatan
manusia, sistem ini menawarkan kemampuan monitoring yang lebih akurat,
berkelanjutan, dan responsif terhadap perubahan kondisi lingkungan. Integrasi berbagai
sensor memungkinkan sistem memberikan informasi yang lebih komprehensif
mengenai kenyamanan termal di dalam Huntara sekaligus melakukan tindakan
otomatis untuk membantu menciptakan lingkungan yang lebih nyaman bagi
penghuninya.
Melalui pengembangan prototype ini, diharapkan masyarakat Huntara pasca bencana tidak hanya memperoleh manfaat berupa peningkatan kenyamanan lingkungan tempat tinggal, tetapi juga mendapatkan edukasi mengenai pentingnya menjaga suhu, kelembapan, kualitas udara, dan pencahayaan yang sehat. Dengan demikian, sistem ini dapat menjadi media pembelajaran sekaligus solusi teknologi sederhana yang mendukung peningkatan kualitas hidup masyarakat dalam masa pemulihan pasca bencana.
A. Meningkatkan Kenyamanan Termal di Lingkungan Huntara
Mengembangkan prototype sistem
kenyamanan termal yang mampu memantau kondisi suhu, kelembapan, kualitas udara,
dan intensitas cahaya secara real-time sehingga dapat membantu menciptakan
lingkungan Huntara yang lebih nyaman dan sehat bagi masyarakat pasca bencana.
B. Mengotomatisasi Pengendalian
Lingkungan Ruangan
Merancang sistem berbasis STM32
Blue Pill yang bekerja secara otomatis dalam mengendalikan perangkat keluaran
seperti exhaust fan, LED indikator, dan buzzer berdasarkan data yang diperoleh
dari sensor, sehingga dapat mengurangi ketergantungan terhadap pengawasan dan
pengendalian secara manual.
C. Memberikan Informasi dan
Peringatan Secara Cepat dan Mudah Dipahami
Menyediakan tampilan informasi
kondisi lingkungan melalui layar OLED serta indikator visual dan audio berupa
LED dan buzzer untuk memberikan peringatan dini ketika suhu, kualitas udara,
atau kondisi lingkungan berada di luar batas kenyamanan yang telah ditentukan.
D. Meningkatkan Edukasi Masyarakat
Mengenai Kenyamanan Lingkungan
Memanfaatkan prototype sebagai
media edukasi bagi masyarakat Huntara pasca bencana agar lebih memahami
pentingnya menjaga kualitas udara, suhu, kelembapan, dan pencahayaan lingkungan
guna mendukung kesehatan, kenyamanan, serta kualitas hidup sehari-hari.
E. Mengoptimalkan Pemanfaatan
Teknologi Sensor dalam Sistem Monitoring Lingkungan
Mengevaluasi dan mengintegrasikan kinerja sensor DHT11/DHT22, MQ-135, dan LDR dalam satu sistem yang terpadu untuk menghasilkan pemantauan kondisi lingkungan yang akurat, responsif, dan mudah diterapkan sebagai solusi teknologi sederhana di lingkungan Huntara.
3. Alat dan Bahan [Kembali]

Gambar 1. Digital Multimeter
Multimeter adalah alat ukur elektronik yang digunakan untuk mengukur berbagai parameter listrik seperti tegangan (volt), arus (ampere), dan resistansi (ohm). Multimeter dapat berbentuk digital maupun analog. Berikut merupakan fungsi dari multimeter:
a. Mengukur Tegangan (Voltage): Multimeter dapat mengukur tegangan listrik dalam rangkaian, baik tegangan searah (DC) maupun tegangan bolak-balik (AC). Rentang pengukuran tegangan biasanya berkisar dari milivolt (mV) hingga ratusan volt (V).
b. Mengukur Arus (Current): Multimeter dapat mengukur aliran arus listrik dalam rangkaian. Multimeter digital dapat mengukur arus DC dan AC dengan rentang dari mikroampere (µA) hingga ampere (A). Untuk mengukur arus, multimeter harus disambungkan secara seri dengan rangkaian.
c. Mengukur Resistansi (Resistance): Multimeter dapat mengukur hambatan dalam komponen atau rangkaian. Satuan resistansi adalah ohm (Ω), dengan rentang pengukuran dari ohm hingga megaohm (MΩ).
d. Pengukuran Tambahan: Beberapa multimeter dilengkapi dengan fitur tambahan seperti pengukuran kapasitansi (farad), frekuensi (hertz), suhu (derajat Celsius atau Fahrenheit), serta tes dioda dan kontinuitas.
Multimeter terbagi menjadi dua jenis utama, yaitu analog dan digital. Multimeter analog menggunakan jarum yang bergerak pada skala untuk menunjukkan nilai pengukuran. Kelebihannya termasuk kemampuan menunjukkan perubahan cepat dalam sinyal dan tidak memerlukan baterai untuk mengukur tegangan dan arus. Namun, multimeter analog cenderung kurang akurat dan lebih sulit dibaca dibandingkan dengan multimeter digital.
Sebaliknya, multimeter digital menampilkan hasil pengukuran dalam bentuk angka pada layar LCD, menawarkan kemudahan baca dan akurasi yang lebih tinggi. Multimeter digital sering dilengkapi dengan fitur tambahan seperti pengukuran kapasitansi, frekuensi, dan suhu. Meskipun biasanya lebih mahal dan membutuhkan baterai untuk semua jenis pengukuran, multimeter digital menyediakan keunggulan dalam kemudahan penggunaan dan keakuratan. Fitur auto-ranging pada multimeter digital juga menambah kepraktisan, dengan secara otomatis memilih rentang pengukuran yang sesuai, sehingga mengurangi risiko kesalahan pengukuran dan kerusakan alat. Berikut ini merupakan cara menggunakan multimeter:
a. Pilih Mode Pengukuran:
Langkah pertama dalam menggunakan multimeter adalah menentukan jenis pengukuran yang ingin dilakukan. Setel sakelar pada multimeter ke mode pengukuran yang diinginkan, apakah itu tegangan (volt), arus (ampere), atau resistansi (ohm). Pemilihan mode yang tepat sangat penting untuk mendapatkan hasil pengukuran yang akurat dan mencegah kerusakan pada multimeter.
b. Hubungkan Probes:
Setelah mode pengukuran dipilih, langkah berikutnya adalah menghubungkan probe. Sambungkan probe merah ke terminal positif pada multimeter dan probe hitam ke terminal negatif. Kemudian, tempatkan ujung probe pada titik-titik yang akan diukur dalam rangkaian. Pastikan sambungan dilakukan dengan benar untuk menghindari kesalahan pengukuran dan untuk melindungi pengguna dari potensi bahaya listrik.
c. Baca Nilai:
Setelah probes terhubung dengan benar, hasil pengukuran akan ditampilkan pada multimeter. Pada multimeter digital (DMM), nilai pengukuran akan muncul dalam bentuk angka pada layar LCD, yang memberikan pembacaan yang jelas dan akurat. Pada multimeter analog, hasil pengukuran akan ditunjukkan oleh jarum yang bergerak pada skala. Penting untuk membaca nilai dengan cermat dan memastikan jarum atau angka berada dalam rentang yang benar sesuai dengan pengaturan mode pengukuran yang telah dipilih.
3.1.2 Solder

Gambar 2. Solder

Gambar 3. Baterai
Spesifikasi :
Input : AC100-240V 50/60Hz
Output : DC 9V 2A

Gambar 4. Breadboard
Breadboard adalah perangkat yang digunakan untuk membuat rangkaian elektronik sementara dan prototipe tanpa perlu menyolder komponen. Alat ini terdiri dari papan dengan lubang-lubang kecil yang terhubung secara elektrik, memungkinkan pengguna untuk memasukkan dan menghubungkan komponen seperti resistor, kapasitor, transistor, dan IC dengan mudah. Breadboard memiliki dua bagian utama: bagian tengah yang digunakan untuk menempatkan komponen, dan bagian samping yang biasanya digunakan untuk distribusi daya. Alat ini sangat berguna dalam tahap pengembangan dan pengujian karena memungkinkan modifikasi dan perbaikan rangkaian dengan cepat dan efisien. Breadboard hadir dalam berbagai ukuran, memungkinkan fleksibilitas dalam pembuatan prototipe untuk berbagai proyek elektronik.
3.1.5 Kabel Jumper

Gambar 5. Kabel Jumper
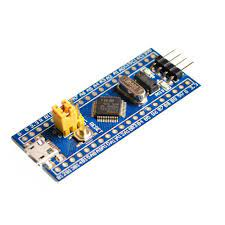
Gambar 6. STM32


DHT11 Sensor adalah sensor digital
yang digunakan untuk mengukur suhu dan kelembapan udara secara bersamaan dalam
satu perangkat yang ringkas dan mudah digunakan. Sensor ini bekerja dengan
memanfaatkan elemen pendeteksi kelembapan berbasis resistif serta termistor NTC
untuk mengukur suhu lingkungan. Data hasil pengukuran kemudian diproses oleh
mikrokontroler internal yang terdapat di dalam sensor dan dikirimkan dalam
bentuk sinyal digital melalui satu jalur komunikasi (single-wire), sehingga
memudahkan integrasi dengan berbagai mikrokontroler seperti STM32 Blue Pill,
Arduino, maupun ESP32.
DHT11 banyak digunakan dalam
aplikasi pemantauan lingkungan, sistem otomasi rumah, stasiun cuaca sederhana,
serta berbagai proyek Internet of Things (IoT) yang memerlukan informasi suhu
dan kelembapan secara real-time. Sensor ini memiliki keunggulan berupa harga
yang ekonomis, konsumsi daya yang rendah, dan kemudahan penggunaan tanpa
memerlukan rangkaian tambahan yang kompleks. Namun, dibandingkan dengan sensor
yang lebih canggih seperti DHT22 atau SHT31, DHT11 memiliki rentang pengukuran
dan tingkat akurasi yang lebih terbatas. Dalam proyek Prototype Sistem
Kenyamanan Termal Sebagai Media Edukasi Bagi Masyarakat Huntara Pasca Bencana
Berbasis STM32 Blue Pill, sensor DHT11 berfungsi sebagai pendeteksi kondisi
suhu dan kelembapan ruangan yang menjadi parameter utama dalam menentukan
tingkat kenyamanan termal penghuni Huntara.
Spesifikasi DHT11 Sensor:
• Tegangan operasi : 3,3V – 5V DC
• Arus operasi : 0,3 mA – 2,5 mA
• Rentang pengukuran suhu : 0°C –
50°C
• Akurasi suhu : ±2°C
• Rentang pengukuran kelembapan :
20% RH – 90% RH
• Akurasi kelembapan : ±5% RH
• Resolusi suhu : 1°C
• Resolusi kelembapan : 1% RH
• Frekuensi pembaruan data : 1 Hz
(1 kali per detik)
• Interface komunikasi :
Single-wire digital signal
• Waktu respon : < 6 detik (kelembapan) dan < 10 detik (suhu)

Sensor MQ-135
MQ135 memiliki sensitivitas terhadap berbagai jenis gas, seperti amonia (NH₃), karbon dioksida (CO₂), benzena (C₆H₆), alkohol, asap rokok, sulfida, serta senyawa organik volatil (Volatile Organic Compounds/VOC). Karena kemampuannya mendeteksi berbagai polutan udara, sensor ini banyak digunakan pada sistem pemantauan kualitas udara, smart home, sistem ventilasi otomatis, alat pendeteksi polusi udara, serta berbagai aplikasi Internet of Things (IoT) yang memerlukan pemantauan kondisi lingkungan secara real-time.
Sensor MQ135 dilengkapi dengan elemen pemanas (heater) internal yang berfungsi menjaga suhu kerja material sensitif agar tetap stabil sehingga proses deteksi gas dapat berlangsung dengan baik. Ketika konsentrasi gas di udara meningkat, resistansi sensor akan berubah dan menghasilkan perubahan tegangan keluaran yang dapat dibaca melalui pin analog maupun digital. Nilai tersebut kemudian digunakan untuk memperkirakan tingkat kualitas udara dalam satuan konsentrasi gas atau kategori kualitas udara tertentu.
Dalam proyek Prototype Sistem Kenyamanan Termal Sebagai Media Edukasi Bagi Masyarakat Huntara Pasca Bencana Berbasis STM32 Blue Pill, sensor MQ135 berfungsi sebagai pendeteksi kualitas udara di dalam Huntara. Data yang diperoleh dari sensor digunakan untuk mengetahui kondisi udara, apakah masih berada pada kategori baik, sedang, atau buruk. Apabila kualitas udara menurun akibat sirkulasi yang kurang baik atau adanya akumulasi polutan di dalam ruangan, sistem dapat memberikan indikator peringatan dan mengaktifkan exhaust fan secara otomatis guna meningkatkan sirkulasi udara sehingga kenyamanan termal penghuni tetap terjaga.



Sensor LDR (Light Dependent
Resistor) adalah komponen elektronik yang nilai resistansinya berubah secara
proporsional terhadap intensitas cahaya yang diterimanya. Prinsip kerjanya
didasarkan pada sifat semikonduktor yang peka terhadap cahaya; ketika cahaya
mengenai permukaan LDR, energi foton diserap oleh material semikonduktor
sehingga meningkatkan jumlah pembawa muatan dan menurunkan nilai hambatan
listrik. Dalam sistem berbasis mikrokontroler, sensor LDR biasanya digunakan
bersama dengan rangkaian pembagi tegangan untuk menghasilkan tegangan analog
yang dapat dibaca melalui saluran ADC (Analog-to-Digital Converter).
Sensor LDR banyak digunakan dalam
aplikasi yang membutuhkan deteksi tingkat pencahayaan, seperti kontrol lampu
otomatis (lighting control), sistem keamanan, pengukuran intensitas cahaya
dalam perangkat medis portabel, serta aplikasi IoT seperti smart home dan smart
agriculture. Karena sifatnya yang tidak linier dan memiliki respons yang
relatif lambat dibandingkan photodiode atau phototransistor, LDR lebih cocok
digunakan dalam aplikasi yang tidak memerlukan respon cepat atau akurasi sangat
tinggi. konsumsi daya yang rendah dalam berbagai mode operasi membuat
mikrokontroler ini ideal untuk aplikasi bertenaga baterai yang menggunakan
sensor LDR sebagai elemen input lingkungan.
spesifikasi
Adapun spesifikasi dari LDR adalah:
● Tegangan
maksimum (DC): 150V.
● Konsumsi
arus maksimum: 100mW.
● Tingkatan
Resistansi/Tahanan : 10Ω sampai 100KΩ
● Puncak
spektral: 540nm (ukuran gelombang cahaya)
● Waktu Respon Sensor : 20ms – 30ms.






OLED
Spesifikasi:
- Interface:
I2C (3.3V / 5V logic level)
- Resolusi:
128 x 64
- Sudut
Pandang: ±160 derajat
- Warna:
Kombinasi Kuning dan Biru
- Power
supply: DC 3.3V~5V
Operating temperature: -20°C~70°C
Ukuran LCD/Board: 2.7 x 2.7 cm


Spesifikasi :
Resistance (ohms)
: 10K, 500K
Power (Watts)
: 0.25W,
1/4W
Tolerance
: -+ 5%
Packaging
: Bulk
Composition
: Carbon Film
Temperature Coefficient : 350
ppm/C
Lead free status
: Lead free
RoHS status : RoHS Compliant

Modul step-down XL4005 adalah perangkat elektronik yang berfungsi untuk menurunkan tegangan arus searah dari nilai input yang lebih tinggi menjadi nilai output yang lebih rendah, sesuai kebutuhan. Modul ini didasarkan pada chip XL4005 yang merupakan konverter DC-DC jenis buck (penurun tegangan) yang sangat efisien. Modul ini dilengkapi dengan komponen-komponen pendukung seperti induktor, kapasitor, dan dioda, serta sebuah trimpot (potensiometer variabel) yang memungkinkan pengguna untuk mengatur tegangan output secara presisi. Saat modul ini diberi tegangan input DC (umumnya antara 5V hingga 32V), ia akan mengolahnya untuk menghasilkan tegangan output DC yang dapat diatur dari 0.8V hingga 24V, dengan kapasitas arus hingga 5 Ampere . Modul step-down XL4005 memainkan peran penting dalam berbagai aplikasi elektronik yang membutuhkan penurunan tegangan secara efisien, seperti catu daya untuk mikrokontroler, pengisian daya baterai lithium, power supply untuk perangkat elektronik portabel, atau sebagai regulator tegangan pada sistem tenaga surya.
Spesifikasi module LX4005
- Input tegangan 4.0~32V Output tegangan 0.8~30V adjustable
- Keluaran arus max 5A rekomendasi 4.5A
- Daya keluaran 75W labih dari 50W gunakanlah heatsink
- Evesiensi konversi hingga 96%
- Frekuensi oprasi 180KHz
- Ukuran 44x21 mm
- Suhu oprasi -40 ~ +85
4. Landasan Teori [Kembali]
A. PWM (Pulse Width Modulation)
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi. Duty Cycle adalah perbandingan antara waktu ON (lebar pulsa High) dengan perioda. Duty Cycle biasanya dinyatakan dalam bentuk persen (%).
• Duty Cycle = tON / ttotal

B. ADC (Analog to Digital Converter)


- MOSI: Master Output Slave Input artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
- MISO: Master Input Slave Output artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output.
- SCLK: Clock jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
- SS/CS: Slave Select / Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.



Listing Program
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Sistem Huntara - HSI 8MHz, LCD I2C manual
* DHT11, MQ-135 DIGITAL (DO)
*
* PIN:
* PA0 = DHT11 (1-wire)
* PA1 = MQ-135 DIGITAL OUT (DO)
* PA2 = LDR Digital Input (DO modul)
* PA3 = Tombol Reset (EXTI Falling, Pull-Up)
* PA4 = LED Merah
* PA5 = LED Kuning
* PA6 = LED Hijau
* PA7 = Buzzer
* PB0 = Relay (Fan) - AKTIF LOW (ON = LOW, OFF = HIGH)
* PB6 = SCL I2C | PB7 = SDA I2C (LCD PCF8574)
******************************************************************************
*/
/* USER CODE END Header */
#include "main.h"
#include <string.h>
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define LCD_ADDR (0x27 << 1) // coba 0x27, jika gagal ganti 0x3F
#define LCD_RS (1 << 0)
#define LCD_EN (1 << 2)
#define LCD_BL (1 << 3)
// MQ-135 digital: LOW = gas terdeteksi (kebanyakan modul)
#define MQ_ACTIVE_LOW 1
// Batas suhu
#define SUHU_HANGAT 30.0f
#define SUHU_EXT_SIANG 34.0f
#define SUHU_EXT_MALAM 31.0f
/* USER CODE END PD */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
uint8_t ldr_status = 0;
float suhu = 0.0f;
float kelembaban = 0.0f;
uint8_t mq_detected = 0;
volatile uint8_t reset_flag = 0;
/* USER CODE END PV */
/* Function prototypes */
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
static void MX_I2C1_Init(void);
/* USER CODE BEGIN PFP */
void delay_us(uint16_t us);
uint8_t DHT11_Read(void);
void Set_Output(uint8_t merah, uint8_t kuning, uint8_t hijau,
uint8_t buz, uint8_t relay);
void LCD_SendI2C(uint8_t data);
void LCD_SendNibble(uint8_t nibble, uint8_t rs);
void LCD_SendByte(uint8_t byte, uint8_t rs);
void LCD_Init(void);
void LCD_Clear(void);
void LCD_SetCursor(uint8_t col, uint8_t row);
void LCD_Print(char *str);
void LCD_Show(char *l1, char *l2);
void LCD_UpdateNormal(const char *status);
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
/* ============================================================
* DELAY MIKRODETIK
* ============================================================ */
void delay_us(uint16_t us)
{
__HAL_TIM_SET_COUNTER(&htim2, 0);
while (__HAL_TIM_GET_COUNTER(&htim2) < us);
}
/* ============================================================
* LCD I2C DRIVER MANUAL
* ============================================================ */
void LCD_SendI2C(uint8_t data)
{
HAL_I2C_Master_Transmit(&hi2c1, LCD_ADDR, &data, 1, 10);
}
void LCD_SendNibble(uint8_t nibble, uint8_t rs)
{
uint8_t d = (nibble & 0xF0) | LCD_BL | (rs ? LCD_RS : 0);
LCD_SendI2C(d | LCD_EN);
delay_us(1);
LCD_SendI2C(d);
delay_us(50);
}
void LCD_SendByte(uint8_t byte, uint8_t rs)
{
LCD_SendNibble(byte & 0xF0, rs);
LCD_SendNibble((byte << 4) & 0xF0, rs);
}
void LCD_Init(void)
{
HAL_Delay(50);
LCD_SendNibble(0x30, 0); HAL_Delay(5);
LCD_SendNibble(0x30, 0); HAL_Delay(1);
LCD_SendNibble(0x30, 0); HAL_Delay(1);
LCD_SendNibble(0x20, 0); HAL_Delay(1);
LCD_SendByte(0x28, 0);
LCD_SendByte(0x0C, 0);
LCD_SendByte(0x06, 0);
LCD_SendByte(0x01, 0);
HAL_Delay(2);
}
void LCD_Clear(void)
{
LCD_SendByte(0x01, 0);
HAL_Delay(2);
}
void LCD_SetCursor(uint8_t col, uint8_t row)
{
uint8_t addr = (row == 0) ? (0x80 + col) : (0xC0 + col);
LCD_SendByte(addr, 0);
}
void LCD_Print(char *str)
{
while (*str) LCD_SendByte(*str++, 1);
}
void LCD_Show(char *l1, char *l2)
{
LCD_Clear();
LCD_SetCursor(0, 0); LCD_Print(l1);
LCD_SetCursor(0, 1); LCD_Print(l2);
}
/* ============================================================
* DHT11
* ============================================================ */
static void DHT_Out(void)
{
GPIO_InitTypeDef g = {0};
g.Pin = DHT_Pin;
g.Mode = GPIO_MODE_OUTPUT_PP;
g.Pull = GPIO_NOPULL;
g.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(DHT_GPIO_Port, &g);
}
static void DHT_In(void)
{
GPIO_InitTypeDef g = {0};
g.Pin = DHT_Pin;
g.Mode = GPIO_MODE_INPUT;
g.Pull = GPIO_PULLUP;
HAL_GPIO_Init(DHT_GPIO_Port, &g);
}
uint8_t DHT11_Read(void)
{
uint8_t data[5] = {0};
uint32_t t;
DHT_Out();
HAL_GPIO_WritePin(DHT_GPIO_Port, DHT_Pin, GPIO_PIN_SET);
delay_us(10);
HAL_GPIO_WritePin(DHT_GPIO_Port, DHT_Pin, GPIO_PIN_RESET);
HAL_Delay(18);
HAL_GPIO_WritePin(DHT_GPIO_Port, DHT_Pin, GPIO_PIN_SET);
delay_us(30);
DHT_In();
t=0; while( HAL_GPIO_ReadPin(DHT_GPIO_Port,DHT_Pin)) if(++t>10000) return 0;
t=0; while(!HAL_GPIO_ReadPin(DHT_GPIO_Port,DHT_Pin)) if(++t>10000) return 0;
t=0; while( HAL_GPIO_ReadPin(DHT_GPIO_Port,DHT_Pin)) if(++t>10000) return 0;
for (int i = 0; i < 40; i++)
{
t=0; while(!HAL_GPIO_ReadPin(DHT_GPIO_Port,DHT_Pin)) if(++t>10000) return 0;
delay_us(40);
if (HAL_GPIO_ReadPin(DHT_GPIO_Port,DHT_Pin))
data[i/8] |= (1 << (7-(i%8)));
t=0; while( HAL_GPIO_ReadPin(DHT_GPIO_Port,DHT_Pin)) if(++t>10000) return 0;
}
if ((uint8_t)(data[0]+data[1]+data[2]+data[3]) != data[4]) return 0;
kelembaban = (float)data[0];
suhu = (float)data[2];
return 1;
}
/* ============================================================
* OUTPUT
* ============================================================ */
void Set_Output(uint8_t merah, uint8_t kuning, uint8_t hijau,
uint8_t buz, uint8_t relay)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, merah ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, kuning ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, hijau ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, buz ? GPIO_PIN_SET : GPIO_PIN_RESET);
// Relay aktif low: relay = 1 (nyala) -> LOW, relay = 0 (mati) -> HIGH
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, relay ? GPIO_PIN_RESET : GPIO_PIN_SET);
}
/* ============================================================
* LCD UPDATE FUNCTIONS
* ============================================================ */
void LCD_UpdateNormal(const char *status)
{
char b1[17], b2[17];
uint8_t i;
const char *s;
int si = (int)suhu;
int sd = (int)((suhu - si) * 10);
if (sd < 0) sd = 0;
if (sd > 9) sd = 9;
int hi = (int)kelembaban;
// Baris 1: T:32.5C H:60%
i = 0;
b1[i++] = 'T'; b1[i++] = ':';
if (si >= 10) b1[i++] = '0' + si / 10;
b1[i++] = '0' + si % 10;
b1[i++] = '.'; b1[i++] = '0' + sd;
b1[i++] = 'C'; b1[i++] = ' ';
b1[i++] = 'H'; b1[i++] = ':';
if (hi >= 10) b1[i++] = '0' + hi / 10;
b1[i++] = '0' + hi % 10;
b1[i++] = '%';
while (i < 16) b1[i++] = ' ';
b1[16] = '\0';
// Baris 2: STATUS + indikasi gas + [SGN/MLM]
i = 0; s = status;
while (*s && i < 8) b2[i++] = *s++;
while (i < 8) b2[i++] = ' ';
if (mq_detected) {
b2[i++] = 'G'; b2[i++] = 'A'; b2[i++] = 'S'; b2[i++] = '!';
} else {
b2[i++] = ' '; b2[i++] = ' '; b2[i++] = ' '; b2[i++] = ' ';
}
b2[i++] = ' ';
if (ldr_status == 1) {
b2[i++] = '['; b2[i++] = 'M'; b2[i++] = 'L'; b2[i++] = 'M'; b2[i++] = ']';
} else {
b2[i++] = '['; b2[i++] = 'S'; b2[i++] = 'G'; b2[i++] = 'N'; b2[i++] = ']';
}
while (i < 16) b2[i++] = ' ';
b2[16] = '\0';
LCD_Show(b1, b2);
}
/* ============================================================
* INTERRUPT CALLBACK
* ============================================================ */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if (GPIO_Pin == BTN_RESET_Pin) reset_flag = 1;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
MX_I2C1_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start(&htim2);
Set_Output(0, 0, 0, 0, 0); // relay mati (HIGH)
HAL_Delay(200);
LCD_Init();
LCD_Show("SISTEM HUNTARA", "Memulai...");
HAL_Delay(2000);
LCD_Show("SISTEM SIAP", "Monitoring...");
HAL_Delay(2000);
/* USER CODE END 2 */
/* Infinite loop */
while (1)
{
/* USER CODE BEGIN 3 */
// 1. Baca DHT11
DHT11_Read();
// 2. Baca MQ-135 digital (PA1)
uint8_t mq_pin = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1);
#if MQ_ACTIVE_LOW
mq_detected = (mq_pin == GPIO_PIN_RESET) ? 1 : 0;
#else
mq_detected = (mq_pin == GPIO_PIN_SET) ? 1 : 0;
#endif
// 3. Baca LDR digital (PA2)
ldr_status = HAL_GPIO_ReadPin(LDR_Digital_GPIO_Port, LDR_Digital_Pin);
float batas = (ldr_status == 1) ? SUHU_EXT_MALAM : SUHU_EXT_SIANG;
// 4. Tombol reset
if (reset_flag) {
reset_flag = 0;
Set_Output(0, 0, 0, 0, 0); // semua mati, relay mati (HIGH)
LCD_Show("ALARM RESET", "Sistem Normal");
HAL_Delay(1500);
continue;
}
// 5. Logika keputusan
if (mq_detected) {
Set_Output(1, 0, 0, 1, 1); // MERAH + Buzzer + Relay ON (LOW)
LCD_UpdateNormal("GAS DETECT");
}
else if (suhu >= batas) {
Set_Output(1, 0, 0, 1, 1); // MERAH + Buzzer + Relay ON (LOW)
LCD_UpdateNormal("PANAS EKSTREM");
}
else if (suhu >= SUHU_HANGAT) {
Set_Output(0, 1, 0, 0, 0); // KUNING saja, relay OFF (HIGH)
LCD_UpdateNormal("HANGAT");
}
else if (suhu< SUHU_HANGAT){
Set_Output(0, 0, 1, 0, 0); // HIJAU menyala, relay OFF (HIGH)
LCD_UpdateNormal("SEJUK");
}
HAL_Delay(2000);
/* USER CODE END 3 */
}
}
/**
* @brief System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) Error_Handler();
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK) Error_Handler();
}
static void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK) Error_Handler();
}
static void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 7;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK) Error_Handler();
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK) Error_Handler();
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK) Error_Handler();
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
HAL_GPIO_WritePin(GPIOA, DHT_Pin|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET); // relay aktif low: awal HIGH (mati)
GPIO_InitStruct.Pin = DHT_Pin|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA1 = MQ-135 digital input
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA2 = LDR digital input
GPIO_InitStruct.Pin = LDR_Digital_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(LDR_Digital_GPIO_Port, &GPIO_InitStruct);
// PA3 = tombol reset EXTI falling
GPIO_InitStruct.Pin = BTN_RESET_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(BTN_RESET_GPIO_Port, &GPIO_InitStruct);
// PB0 = relay aktif low, output push-pull
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI3_IRQn);
}
void Error_Handler(void)
{
__disable_irq();
while (1) {}
}
6. Rangkaian Simulasi dan Prinsip Kerja
- Catat
data suhu, kelembapan, kualitas udara, dan intensitas cahaya yang
diperoleh.
- Bandingkan
hasil pembacaan sensor dengan kondisi lingkungan sebenarnya.
- Evaluasi
respon LED, buzzer, OLED, dan exhaust fan terhadap perubahan kondisi
lingkungan.
- Analisis tingkat keberhasilan sistem dalam memberikan informasi dan meningkatkan kenyamanan termal pada lingkungan Huntara pasca bencana.

Prototype Sistem Kenyamanan Termal
Sebagai Media Edukasi Bagi Masyarakat Huntara Pasca Bencana Berbasis STM32 Blue
Pill bekerja dengan melakukan pemantauan kondisi lingkungan secara otomatis
melalui tiga sensor utama, yaitu sensor DHT11/DHT22 untuk mengukur suhu dan
kelembapan, sensor MQ-135 untuk memantau kualitas udara, serta sensor LDR untuk
mendeteksi intensitas cahaya lingkungan. Seluruh data sensor dibaca dan
diproses oleh mikrokontroler STM32 Blue Pill sebagai pusat kendali sistem.
Berdasarkan hasil pembacaan tersebut, sistem akan menentukan kondisi lingkungan
dan mengaktifkan aktuator yang sesuai untuk menjaga kenyamanan penghuni
Huntara.
Pada tahap awal, sistem melakukan
inisialisasi seluruh sensor dan perangkat keluaran. Setelah sistem aktif, STM32
secara berkala membaca data suhu dan kelembapan dari sensor DHT11/DHT22, data
kualitas udara dari sensor MQ-135, serta data intensitas cahaya dari sensor
LDR. Data yang diperoleh kemudian diproses untuk menentukan status kenyamanan
lingkungan secara real-time.
Untuk parameter suhu, sistem
melakukan klasifikasi kondisi berdasarkan nilai temperatur yang terukur. Jika
suhu berada di bawah 30°C, kondisi dianggap sejuk sehingga LED hijau akan
menyala sebagai indikator bahwa kondisi ruangan masih nyaman. Apabila suhu
berada pada rentang 30°C hingga 34°C, kondisi dikategorikan hangat dan sistem
akan menyalakan LED kuning sebagai tanda bahwa suhu mulai meningkat. Ketika
suhu melebihi 34°C, kondisi dianggap panas ekstrem sehingga LED merah akan
menyala dan buzzer akan aktif sebagai peringatan kepada penghuni. Selain itu,
sistem juga mengaktifkan relay yang mengendalikan exhaust fan untuk membantu
menurunkan suhu ruangan melalui peningkatan sirkulasi udara.
Selanjutnya, sistem melakukan
pemeriksaan terhadap kualitas udara menggunakan sensor MQ-135. Jika konsentrasi
gas dan polutan masih berada dalam batas aman, maka udara dikategorikan bersih
dan sistem mempertahankan kondisi normal dengan indikator LED hijau. Namun,
apabila sensor mendeteksi kualitas udara yang buruk akibat peningkatan
konsentrasi asap, gas, atau polutan lainnya, maka kondisi udara dikategorikan
sebagai udara pengap atau berasap. Pada kondisi ini, LED merah dan buzzer akan
aktif sebagai tanda peringatan, sedangkan relay akan menghidupkan exhaust fan
untuk membuang udara kotor dan menggantinya dengan udara yang lebih segar.
Selain memantau suhu dan kualitas
udara, sistem juga mengukur intensitas cahaya lingkungan menggunakan sensor
LDR. Jika intensitas cahaya berada di atas nilai ambang batas yang telah
ditentukan, kondisi dianggap terang atau siang hari. Pada kondisi ini, layar
OLED bekerja dengan tingkat kecerahan normal, LED indikator beroperasi seperti
biasa, dan pengendalian exhaust fan hanya bergantung pada kondisi suhu dan
kualitas udara. Sebaliknya, apabila intensitas cahaya berada di bawah ambang
batas yang ditentukan, sistem menganggap kondisi lingkungan sedang gelap atau
malam hari. Dalam kondisi tersebut, sistem mengaktifkan mode hemat energi
(sleep mode), meredupkan tampilan OLED (OLED dimming), serta mengurangi
intensitas pencahayaan LED indikator. Selain itu, sistem juga menyesuaikan
parameter kenyamanan dengan menurunkan ambang suhu pengaktifan exhaust fan dari
34°C menjadi 31°C, karena pada malam hari penghuni cenderung lebih sensitif
terhadap kondisi panas dan sirkulasi udara.
Setelah seluruh proses pengambilan
keputusan dilakukan, STM32 mengendalikan aktuator yang terdiri dari LED
indikator, buzzer, relay, dan exhaust fan sesuai kondisi lingkungan yang
terdeteksi. Seluruh informasi penting seperti suhu, kelembapan, status kualitas
udara, dan intensitas cahaya ditampilkan pada layar OLED sehingga dapat
dipantau secara langsung oleh pengguna. Tampilan ini berfungsi sebagai media
edukasi yang membantu masyarakat memahami kondisi lingkungan tempat tinggal
mereka secara sederhana dan informatif.
Proses tersebut berlangsung secara terus-menerus dalam bentuk siklus monitoring real-time. Sistem akan memperbarui data sensor setiap beberapa detik, melakukan evaluasi ulang terhadap kondisi lingkungan, kemudian menyesuaikan respons aktuator secara otomatis. Dengan mekanisme ini, prototype mampu memberikan pemantauan lingkungan yang berkelanjutan sekaligus membantu meningkatkan kenyamanan termal masyarakat yang tinggal di Huntara pasca bencana.
Video Simulasi
Simulasi Proteus
Kesimpulan
Berdasarkan hasil perancangan dan implementasi yang telah dilakukan, Prototype Sistem Kenyamanan Termal sebagai Media Edukasi bagi Masyarakat Huntara Pasca Bencana Berbasis STM32 Blue Pill berhasil direalisasikan dan mampu menjalankan fungsi pemantauan kondisi lingkungan secara real-time. Sistem ini memanfaatkan sensor DHT11 untuk mengukur suhu dan kelembapan udara, sensor MQ135 untuk mendeteksi kualitas udara, serta sensor LDR untuk mendeteksi intensitas cahaya di lingkungan sekitar Huntara.
Data yang diperoleh dari seluruh sensor diproses oleh mikrokontroler STM32 Blue Pill dan ditampilkan melalui OLED sehingga pengguna dapat memantau kondisi lingkungan dengan mudah dan informatif. Selain itu, sistem juga dilengkapi dengan indikator LED dan mekanisme pengendalian exhaust fan secara otomatis sebagai respons terhadap perubahan kondisi lingkungan yang dapat memengaruhi kenyamanan penghuni.
Implementasi sistem ini menunjukkan bahwa teknologi mikrokontroler dan sensor dapat dimanfaatkan sebagai solusi sederhana, ekonomis, dan efektif untuk meningkatkan kenyamanan termal pada hunian sementara pasca bencana. Tidak hanya berfungsi sebagai alat pemantauan, prototype ini juga menjadi media edukasi yang membantu masyarakat memahami pentingnya menjaga kualitas udara, suhu, dan kelembapan lingkungan demi menciptakan kondisi hunian yang lebih sehat dan nyaman.
Dengan demikian, proyek ini berhasil mencapai tujuan yang telah ditetapkan, yaitu merancang dan membangun sistem monitoring serta pengendalian kenyamanan termal yang mampu bekerja secara otomatis, informatif, dan mudah dipahami oleh pengguna.
Saran
Meskipun sistem yang dirancang telah mampu menjalankan fungsi monitoring dan pengendalian kenyamanan termal dengan baik, masih terdapat beberapa aspek yang dapat dikembangkan lebih lanjut untuk meningkatkan performa dan manfaat sistem di masa mendatang.
Pertama, penggunaan sensor DHT11 dapat digantikan dengan sensor yang memiliki tingkat akurasi lebih tinggi, seperti DHT22 atau SHT31, sehingga data suhu dan kelembapan yang diperoleh menjadi lebih presisi. Kedua, sistem dapat dikembangkan dengan menambahkan konektivitas Internet of Things (IoT) sehingga data kondisi lingkungan dapat dipantau secara jarak jauh melalui smartphone atau platform berbasis web.
Selain itu, penyimpanan data historis menggunakan kartu memori atau cloud dapat ditambahkan untuk keperluan analisis kondisi lingkungan dalam jangka panjang. Pengembangan lebih lanjut juga dapat dilakukan dengan menerapkan algoritma kendali yang lebih cerdas, seperti logika fuzzy atau kecerdasan buatan, sehingga sistem mampu mengambil keputusan yang lebih adaptif terhadap perubahan kondisi lingkungan.
Sebagai langkah menuju implementasi nyata, prototype berbasis kardus yang digunakan pada penelitian ini dapat dikembangkan menjadi sistem skala sebenarnya yang diterapkan langsung pada Huntara atau bangunan hunian sementara. Dengan pengembangan tersebut, sistem diharapkan tidak hanya menjadi media edukasi, tetapi juga mampu memberikan kontribusi nyata dalam meningkatkan kualitas hidup dan kenyamanan masyarakat yang terdampak bencana.
8. Download File [Kembali]







